ARGOS – The myth
In Odyssey, Argos was Odysseus’ faithful dog known for his speed and strength and his superior tracking skills.

- Funded by: H.F.R.I.
- In cooperation with: University of Delaware (USA)
- Reference Name: ARGOS
- Period: December 2019 – March 2024
In this research program, we focused on fundamental research objectives that allow bringing agile quadruped robots with inspection capabilities into the Precision Agriculture (PA) domain. To this end, the main objectives were: (a) design and develop the quadruped robot ARGOS featuring increased efficiency, agility, and stability. Special focus was given to the design of its limbs and body so that actuation and control of the robot is facilitated. (b) design novel controllers (high, and low level) that guarantee system stability in the presence of disturbances, and that allow setting desired goals, and (c) develop a high-end perception and localization system enabling ARGOS to navigate successfully in vineyards and perform tasks such as vine monitoring.
One of the main objectives of the project is to present a simulation model for the quadruped robot ARGOS using the Gazebo simulator. The model of Argos in Gazebo is presented in this figure.





Videos
Multicamera Visual SLAM For Vineyard Inspection.
Vinymap: a Vineyard Inspection and 3D Reconstruction Framework for Agricultural Robots.
Navigation using Visual Odometry and AprilTag detection.
Slope Handling for Quadruped Robots Using Deep Reinforcement Learning and Toe Trajectory Planning.
ARGOS in the synthetic vineyard (Gazebo and RVIZ).
ARGOS in the synthetic vineyard 2 (Gazebo).
Experiments of ARGOS Manipulator.
Experiments of ARGOS Manipulator.
Experiments of ARGOS Manipulator:
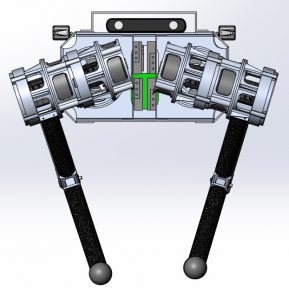
In these videos, various candidate designs for the manipulator that were developed in the project before reaching the final design are presented and tested. The designs include the most widespread solutions for a parallel elbow actuation joint. The videos include position control and trajectory tracking for all designs along with experiments showing programmable interaction with the environment; forces are exerted at the tip of the manipulator and the tunable compliant behavior of the system is shown in live plots.
Evangelos Papadopoulos
Professor
Research Interests: Robotics, Dynamic Systems and Control, Mechatronics, Control of Mobile Robotic Systems incl. Space, Forestry and Underwater Robotics, Medical Haptic Devices, Microrobotics, Legged Robots, Training Simulators, Planning, Electrohydraulic Servo Control, and Design.
![]()
![]()

Konstantinos Koutsoukis
PhD Candidate
He received his Diploma in Mechanical Engineering from the National Technical University of Athens (NTUA) in October 2012. His thesis concerned the development of a modeling and a simulation environment with experimental validation for a monopod robot. He is currently working on the dynamics and control of quadruped robots with segmented torso.
![]()
![]()

Konstantinos Machairas
PhD Candidate
Kostas was born in Athens in April 1989. He received a Diploma in Mechanical Engineering from the National Technical University of Athens (NTUA), Greece, in February 2013. He works in the area of embedded systems and robotics since 2008. Currently, he is a PhD candidate in the Department of Mechanical Engineering of NTUA. His research focuses on dynamics, design and control of legged robots. Besides his academic research, he has extended professional experience.
![]()
![]()

Thanasis Mastrogeorgiou
PhD Candidate
He received his BSc in Applied Informatics from the University of Macedonia in Thessaloniki in 2008, MSc in Artificial Intelligence from the University of Edinburgh & MSc in Automation from the National Technical University of Athens, in 2009 and 2013 respectively. His research focuses on perception, motion planning, and control for biomimetic legged robots so that they can handle rough terrains and slopes.
![]()
![]()


![]()
![]()
Publications
1. Mastrogeorgiou, A., ElBahrawy, Y., Kecskeméthy, A., and Papadopoulos, E., “Slope Handling for Quadruped Robots Using Deep Reinforcement Learning and Trajectory Planning,” Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS ‘20), Las Vegas, NV, USA, Oct. 25-29, 2020.
2. Mastrogeorgiou, A., ElBahrawy, Y., Machairas, K., Kecskeméthy, A., and Papadopoulos, E., “Evaluating Deep Reinforcement Learning Algorithms for Quadrupedal Slope Handling,” 23rd International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, (CLAWAR 2020), Moscow, Russian Federation, 24-26 August 2020. Second Prize Award.
3. Koutsoukis, Κ. and Papadopoulos, Ε., “On the Effect of Robotic Leg Design on Energy Efficiency,” Proc. IEEE International Conference on Robotics and Automation (ICRA ‘21), Xi’an, China, May 30-June 5, 2021.
4. Zournatzis I., Koutsoukis K., Machairas K., Kecskeméthy A., Papadopoulos, E., “Maera: A Hybrid Wheeled-Legged Robot Designed for Research and Education,” in: Lepuschitz W., Merdan M., Koppensteiner G., Balogh R., Obdržálek D. (eds) Robotics in Education. RiE 2020. Advances in Intelligent Systems and Computing, vol 1316. Springer, Cham. https://doi.org/10.1007/978-3-030-67411-3_22.
5. Papatheodorou, A., Mastrogeorgiou, A., Machairas, K., Koutsoukis, K., Papadopoulos, E., “EtherCAT Master for Laelaps II Quadruped,” ROS World 2020, virtual event, November 12, 2020 https://vimeo.com/480516549.
6. Papatheodorou, A., Mastrogeorgiou, A., Machairas, K., Koutsoukis, K., Papadopoulos, E., “Middleware interconnecting ROS/ROS2 with the EtherCAT protocol,” ROS World 2021, virtual event, October 20-21, 2021.
7. Mastrogeorgiou, A., Papatheodorou, A., Koutsoukis, K., Papadopoulos, E. (2023), Learning Energy-Efficient Trotting for Legged Robots. In: Cascalho, J.M., Tokhi, M.O., Silva, M.F., Mendes, A., Goher, K., Funk, M. (eds) Robotics in Natural Settings. CLAWAR 2022. Lecture Notes in Networks and Systems, vol 530. Springer, Cham. https://doi.org/10.1007/978-3-031-15226-9_21.
8. Machairas, K., and Papadopoulos, E., “Design and motion guidelines for quadrupedal locomotion of maximum speed or efficiency with serial and parallel legs,” Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS ’23), Detroit, USA, October 1–5, 2023.
9. Kokas, C, A., Mastrogeorgiou, A., Machairas, K., Koutsoukis, K., Papadopoulos, E, “Multicamera Visual SLAM For Vineyard Inspection,” submitted to the 32nd Mediterranean Conference on Control and Automation (MED 24), June 11-14, Chania, Greece.
10. Zarras, I., Mastrogeorgiou, A., Machairas, K., Koutsoukis, K., and Papadopoulos, E., “Vinymap: A Vineyard Inspection And 3D Reconstruction Framework For Agricultural Robots,” Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS ’24), Abu Dhabi, UAE, October 14–18, 2024.
Contact
National Technical University of Athens (NTUA)
9 Heroon Polytechniou Str., Zografou
Athens 15780, Greece
Building M, Room M.-101
tel:+(30) 210-772-3512
tel:+(30) 210-772-1440
Emails:
egpapado@central.ntua.gr
amast@central.ntua.gr
kkoutsou@central.ntua.gr
kmach@central.ntua.gr